PGADP数据驱动的优化控制
本文是对《Policy Gradient Adaptive Dynamic Programming for Data-Based Optimal Control》文章的整理归纳
期刊:《IEEE TRANSACTIONS ON CYBERNETICS》2019影响因子:11.079
这篇文章考虑了离散时间非线性系统的无模型的最优控制问题,提出了一个基于数据的策略梯度自适应动态规划算法(PGADP),使用离线和在线的数据而不是数学模型,使用梯度下降方法来改进策略,这篇文章还证明了PGADP算法的收敛性。
简介
最优控制问题一般需要求解一个复杂的Hamilton-Jacobi-Bellman equation,对于非线性系统,很难求出解析解,用ADP求解该方程在近年来取得了较大的成果。
主要分为三大类:
- model based:用ADP来近似求解HJBE
- partially model based:既用模型也用数据
- model free:模型未知,完全从数据中学习控制策略
问题描述
考虑如下非线性系统:
这篇文章考虑了model-free的最优控制方法,也就是说,除了知道该系统是Lipschitz连续的,该系统
最优控制器设计的目标是:找到一个反馈控制率
其中,
优化问题可以描述成:
最优控制策略是:
策略梯度自适应动态规划算法
最优控制问题需要求解以下HJBE方程:
很显然,由于系统模型未知,解析解求不出来的。
给定一个容许控制策略:
从上式经过一步展开可以得到如下递推表达式:
最优的状态价值函数可以表示成:
再定义一个动作状态价值函数,或称为Q函数:
进一步可以写成:
Q函数
求得的最优控制策略是:
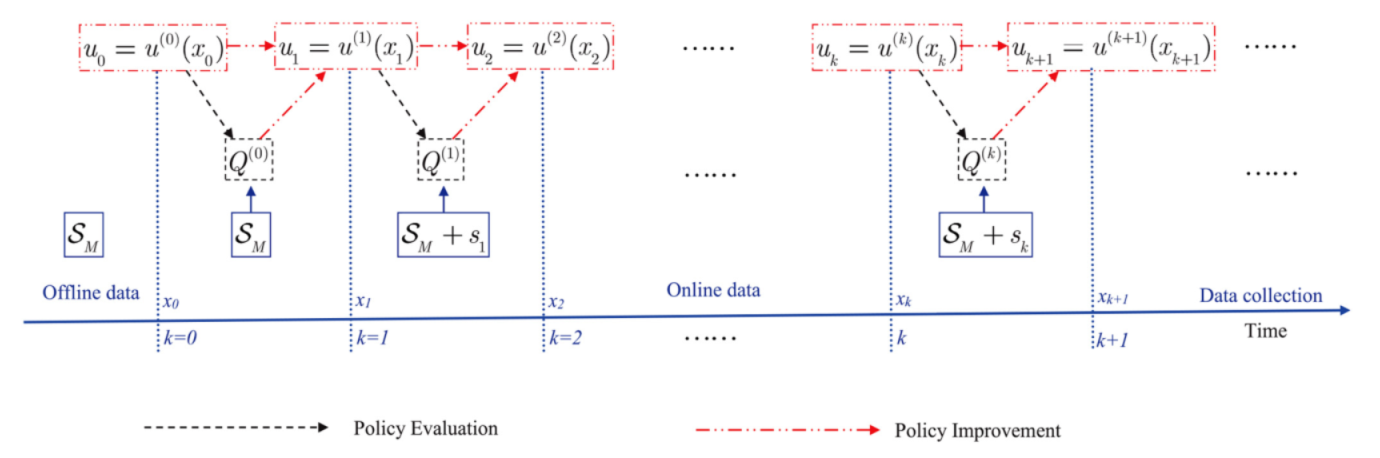
数据分为两部分:离线数据和在线数据
离线数据:
离线数据可以通过任意的控制约束集中的控制动作进行采样获得。
在线数据:
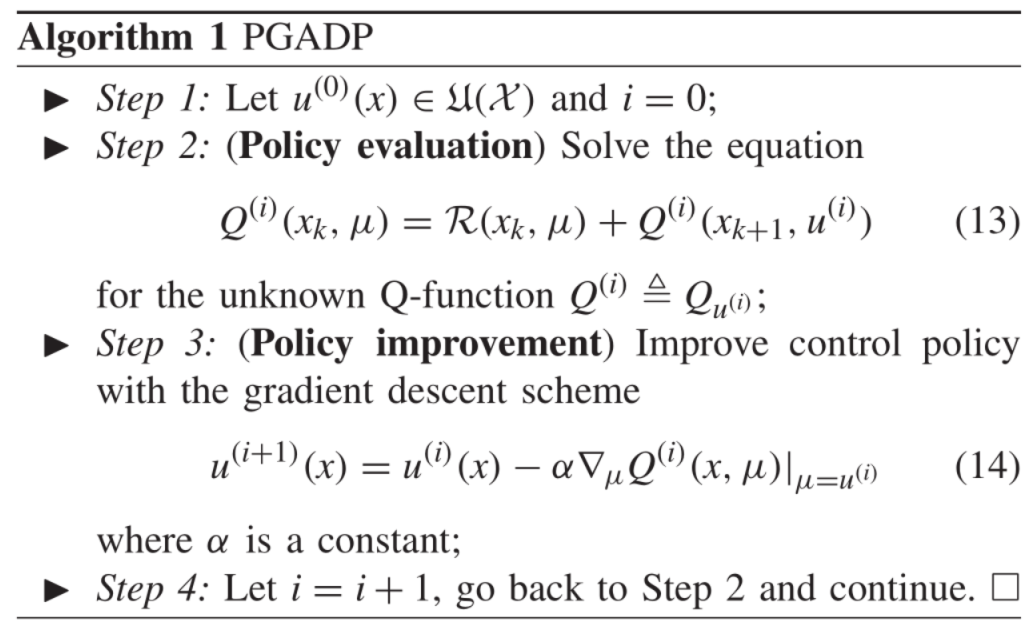
算法流程:
给定一个初始容许控制策略:
使用离线数据
在
通过Policy Improvement来求解
同样的,利用离线数据
重复下去,直至收敛。
基于PGADP的actor-critic结构
仿真
- 标题: PGADP数据驱动的优化控制
- 作者: Oliver xu
- 创建于 : 2020-08-02 10:43:54
- 更新于 : 2026-07-15 21:43:51
- 链接: https://blog.oliverxu.cn/2020/08/02/PGADP数据驱动的优化控制/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。