重要性采样及KL散度分析与不同实现方法
最近在看《Guided policy search》这篇文章,其中,用到了Importance Sampling,KL divergence等技术,虽然这些之前都用过,但是没有系统的整理过一些文档出来,《Guided policy search》这篇文章是13年的,但是TRPO和PPO等一些算法用到的技术,在这篇文章里基本都有用到了。初步感觉这篇文章还是比较经典的。
这篇文章里举的例子都是以强化学习的连续动作空间中的policy来举例的。
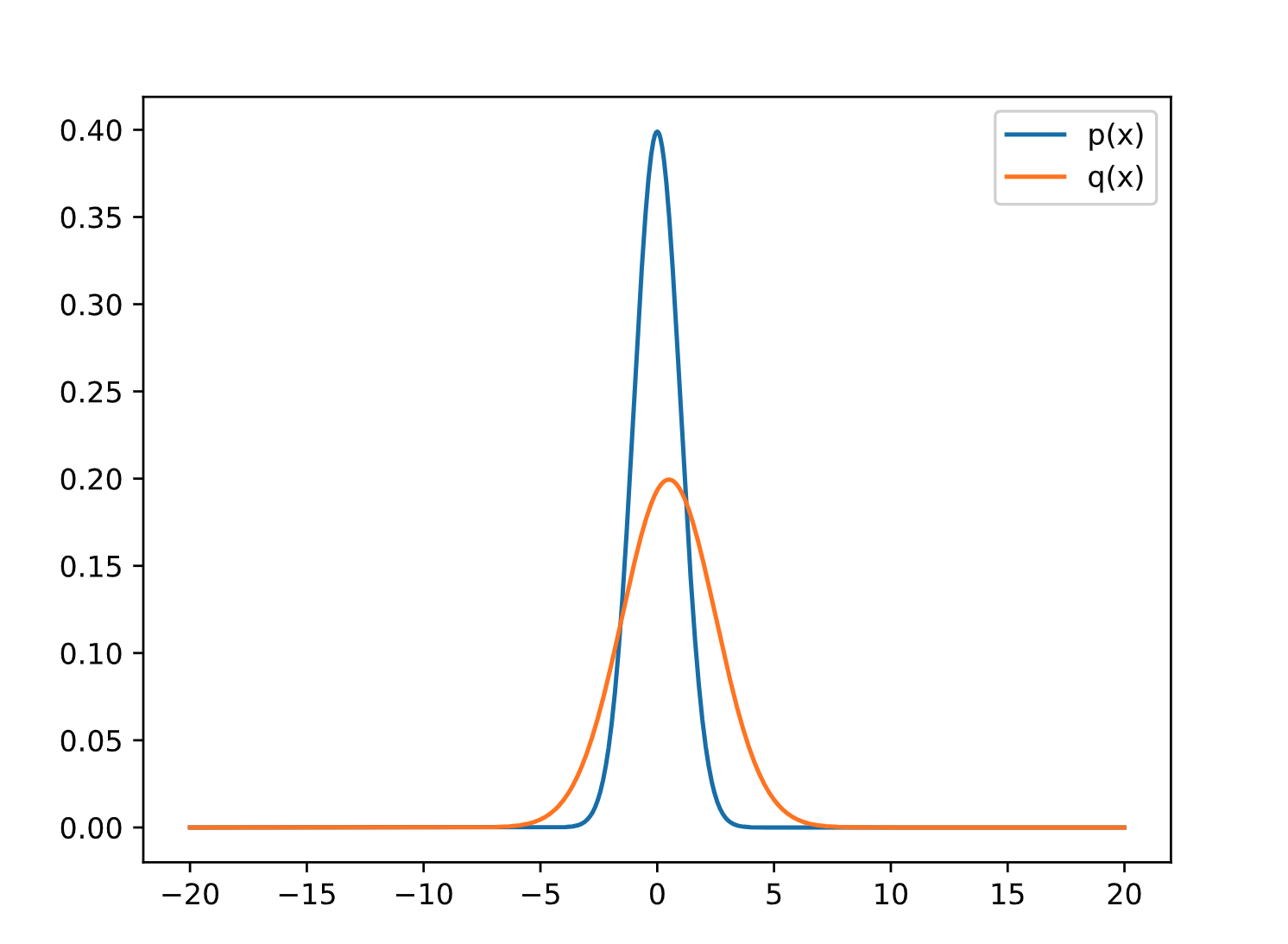
产生两个策略用于验证:
因为我的研究方向是强化学习,所以举的例子用的也是强化学习中的连续空间的Policy来说明。以PPO算法为例,一般来说,当使用Actor-Critic网络的结构时,actor的输入是State,输出是action对应维度的正态分布的均值
1 | import numpy as np |
函数参考:
- Pytorch MultivariateNormal:https://pytorch.org/docs/stable/distributions.html
Creates a multivariate normal (also called Gaussian) distribution parameterized by a mean vector and a covariance matrix.
Importance Sampling原理
考虑这样一个情况,你想要计算一个函数
如果用Monte Carlo方法来计算这个期望的话,相当于对这个分布进行不断采样(对
对应的解决方法就是Importance Sampling技术,该技术“Importance Sampling has been successfully used to accelerate stochastic optimization in many convex problems.《Biased Importance Sampling for Deep Neural Network Training》”。
这篇知乎https://zhuanlan.zhihu.com/p/41217212 给出了一个重要性采样的Demo,是用来求曲线的面积为例子,对于难以直接求解析解的曲线的积分,无法直接求出其积分,往往采用估计的方式,即在被积区间中进行采样,利用微积分的分段,求和,取极限的思想来近似逼近曲线的积分或者说面积。
如果采样是均匀的,可以得到一种估计,但是,这种估计方式会随着采样数的增大而越来越精确,另一方面:当采样数量是一定的时候,有没有什么办法来提高积分计算的准确度,减少计算的方差。这篇知乎中给出的这个例子很有趣。很明显,在概率密度函数大的地方,其函数值对积分的影响作用也大,这时候,在该区域加大采样的数量,可以相应的提高计算的准确度。
Importance Sampling实现
在使用off-policy算法时,主要有两个策略(不考虑TD3这种),一个是Behavior policy,另一个是Target Policy
- Behavior policy:更新次数快,用于产生学习过程中所需要的episode
- Target policy:更新过程慢,通常在behavior policy更新到一定程度后,再将behavior policy的参数传输到Target policy
或者换句话说其实有两个behavior policy,只不过一个更新慢,一个更新快,当然当迭代到一定次数后,其理想状态都是收敛到最优值。使用Importance Sampling的技术可以通过Behavior policy去估计Target policy的期望的Return。
1 | def fx(x): |
1 | Simulation Value tensor([0.9414]) |
Question:RL(例如PPO)中IS是怎么使用的fx定义的是什么?
Answer:fx定义的是Advantage,最终目标函数求的是Advantage的均值,最大化其均值。
可以参考:https://zhuanlan.zhihu.com/p/388707220
KL divergence原理
信息量化的准则:
- 非常可能发生的事件信息量要比较少,并且极端情况下,确保能够发生的事件应该没有信息量。
- 较不可能发生的事件具有更高的信息量。
- 独立事件应具有增量的信息。例如,投掷的硬币两次正面朝上传递的信息量,应该是投掷一次硬币正面朝上的信息量的两倍。
一个事件
熵(Entropy)的定义
在信息论中是对信息量的度量,在物理学与热力学中是对混乱度的度量。
香农熵给出了事件所属的整个分布欧的不确定性总量量化:
相对熵(KL散度)
对于一个随机变量
KL divergence实现
1 | px = MultivariateNormal(torch.tensor([5.0], dtype=torch.float32), torch.tensor([[1.0]], dtype=torch.float32)) |
1 | tensor(4.5000) |
参考资料:https://pytorch.org/docs/stable/distributions.html
TORCH.DISTRIBUTIONS:这个模块参考的是TensorFlow Distribution包,主要有两种方法来进行反向传播(直接对随机样本进行反向传播是不可行的,所以具体来说,TRPO和PPO算法论文中提到的两种替代函数的计算方法):一个是Score function,还有一个是Pathwise derivative。
- Score function:
- Pathwise derivative:
torch.distributions.kl.kl_divergence(p, q)
验证:对于单维的高斯分布,其KL散度的推导可以参考:https://zhuanlan.zhihu.com/p/22464760 ,其最终表达式为:
对上述方针结果的分析可以发现,两者的结果一样,但是torch.distributions.kl.kl_divergence的源码及其计算的原理后续还需要写一篇文章继续深入分析一下。
参考文献:
https://zhuanlan.zhihu.com/p/143105854
https://zhuanlan.zhihu.com/p/150693309
- 标题: 重要性采样及KL散度分析与不同实现方法
- 作者: Oliver xu
- 创建于 : 2021-08-18 12:32:48
- 更新于 : 2026-03-28 21:17:52
- 链接: https://blog.oliverxu.cn/2021/08/18/重要性采样及KL散度分析与实现/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。